| "RoboticMusic" à la 53ème Biennale de Venise 2009
Date : du 25 septembre 2009 au 3 octobre 2009
Place: Foyer of the Teatro alle Tese, Venice, Italy
Lieu : Foyer de Teatro alle Tese, Venise, Italie
en collaboration avec IRCAM, Paris
http://www.ircam.fr/
Assistance technique : iXs Research Corp.
http://www.ixs.co.jp/
Suguru Goto
RoboticMusic
Pour 5 robots de percussionniste
Ingénieur mécanicien : Alain Terrier (IRCAM)
Information:
http://www.labiennale.org/en/music/program/sugurugoto.html?back=true
http://www.labiennale.org/en/music/news/53.html
Venice Biennale (La Biennale di Venezia):
http://www.labiennale.org/en/Home.html
http://fr.wikipedia.org/wiki/Biennale_de_Venise
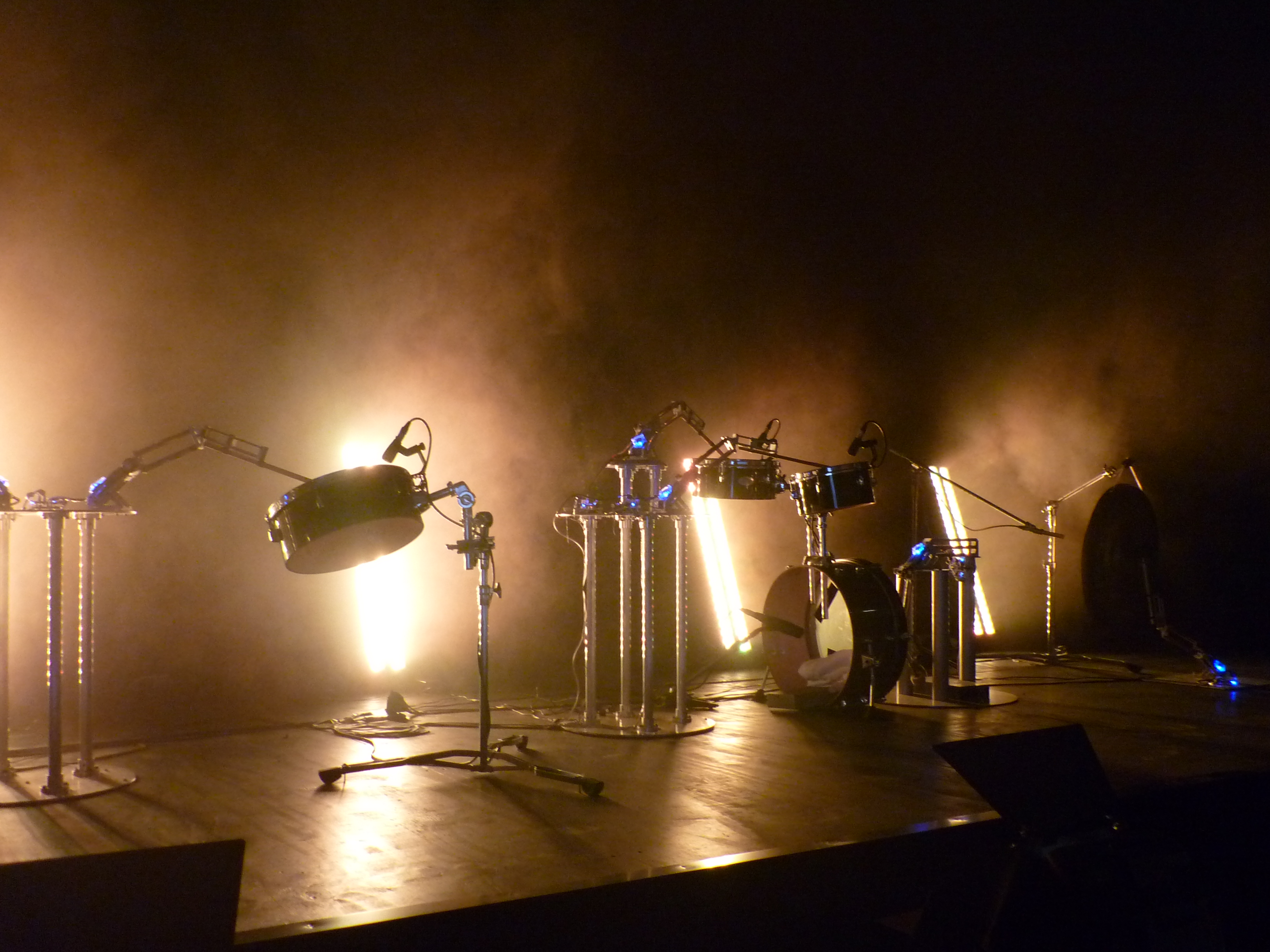
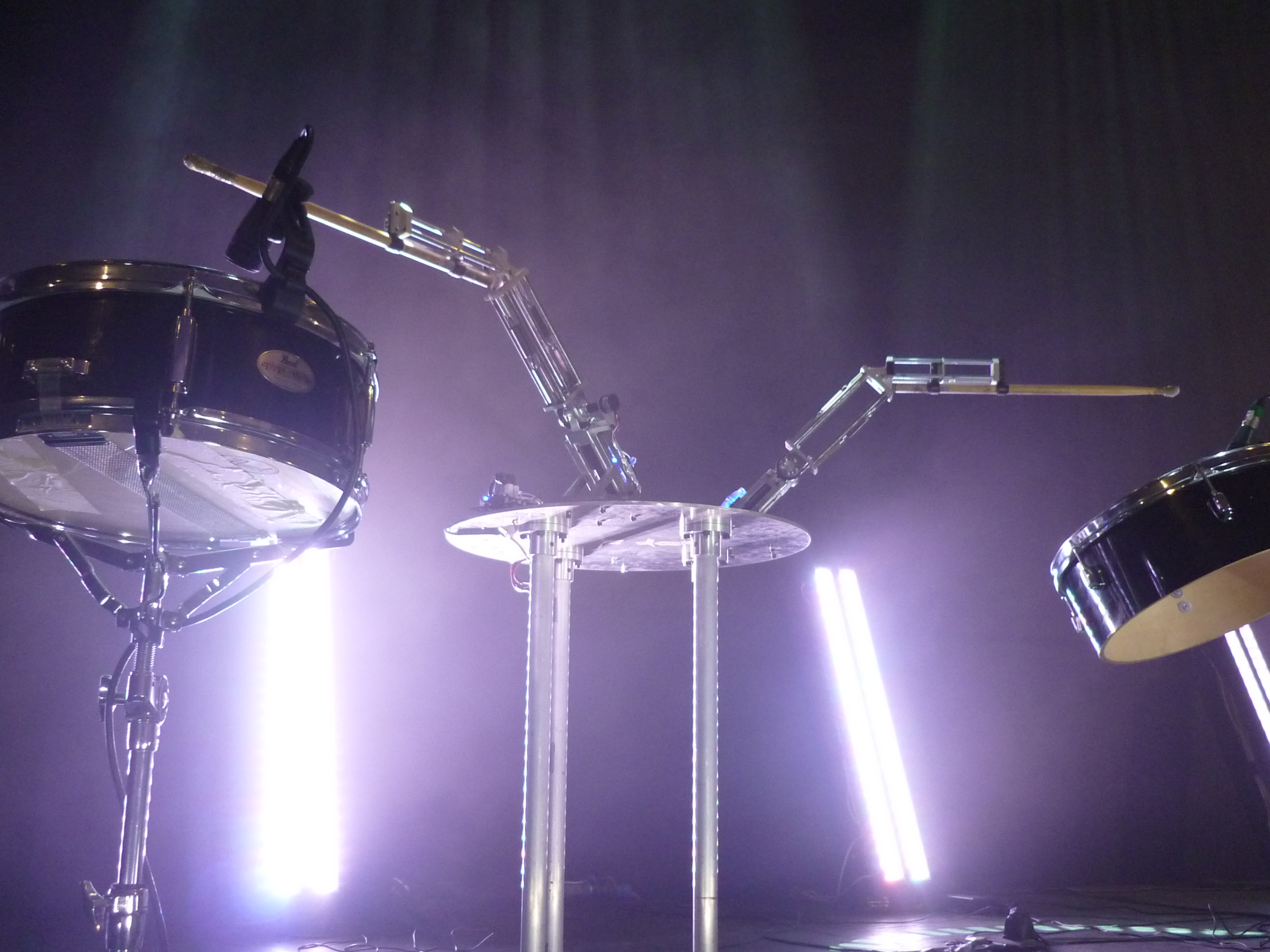
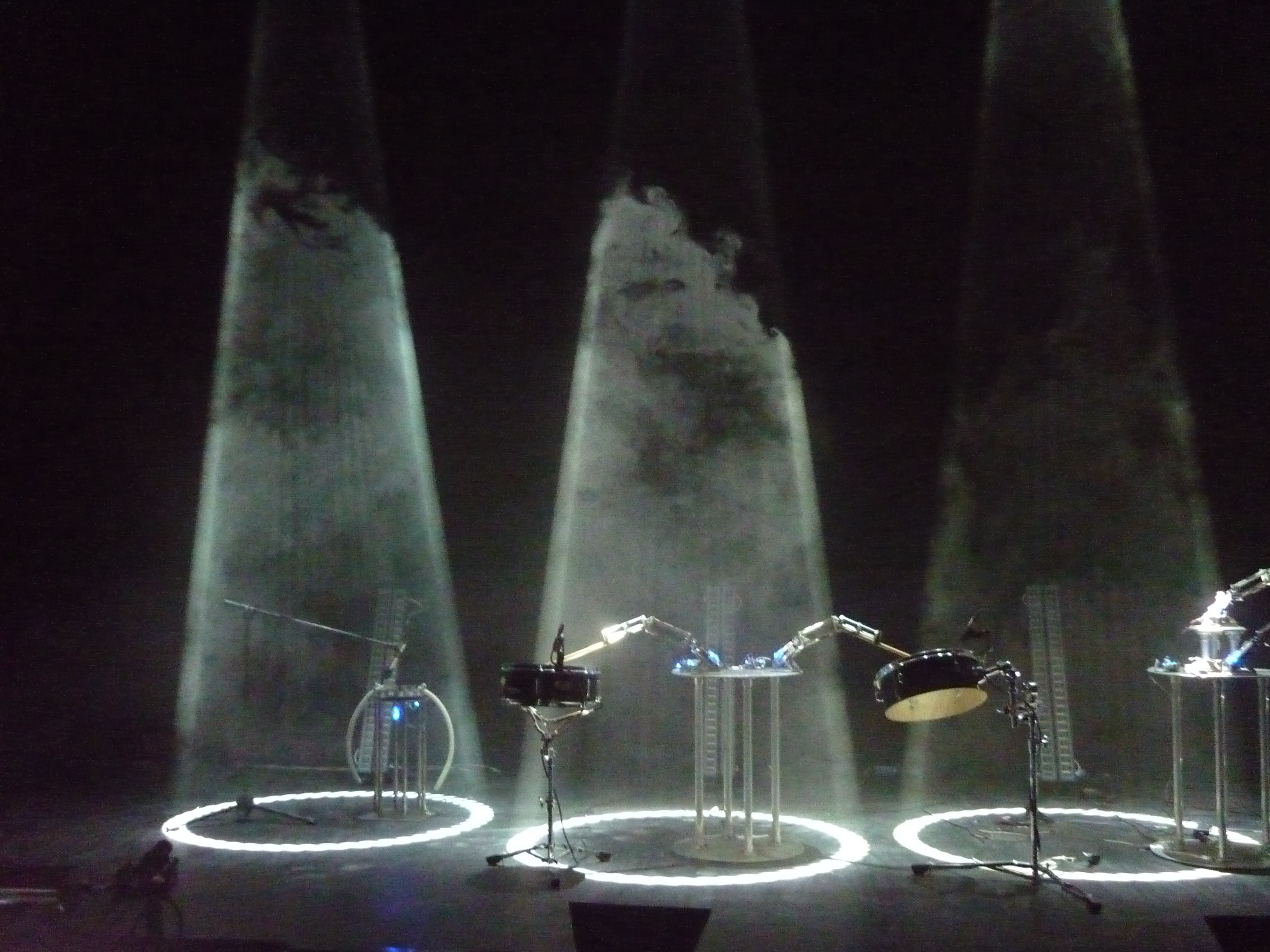
Description détaillée des robots de percussion - "RoboticMusic"
RoboticMusic est constitué de 5 robots qui jouent d'instruments a percussions tels qu'un gong, une grosse caisse, des tambours, un tambour a timbre, des cymballes et un instrument a tuyaux. Ces instruments peuvent etre remplacés par d'autres pour autant qu'ils se jouent avec des maillets. L'un des robots est constitué de plusieurs tuyaux de différentes longueurs qui, actionnés circulairement, produisent un son comparable a celui d'une flute. Plus le mouvement circulaire est rapide, plus le son monte dans l'aigü. La technologie la plus récente en matiere de robotique humanoide a été appliquée bien que les robots de RoboticMusic ne marchent pas sur deux pieds ou ne possedent ni yeux, ni oreilles. Néanmoins cette technologie permet de créer des bras robotique capables d'approcher, en terme d'expression musicale, une performance humaine. A cette différence qu'un robot peut jouer sans fatigue, avec plus de précision et plus rapidement qu'un etre humain. Cycling'74, Max est utilisé comme interface et pour produire des données musicales. On peut également envoyer des parametres de base aux robots, tels que la position du bras, la position offset, l'intensité de frappe et ainsi de suite. Max envoie aussi des signaux a un autre ordinateur sous Linux par l'intermédiaire de UDP. Le logiciel sous Linux est développé par iXs Research Corporation. Ce logiciel a une fonction importante dans la mesure ou il contrôle le mouvement des robots. De l'ordinateur sous Linux aux robots, ceux-ci sont reliés par l'intermédiaire d'un câble USB. Chaque robot a sa propre interface, qui est reliée a un déclencheur et a un capteur. Les robots sont équipés de ressorts conçus pour imiter un muscle humain. Chacun tient un maillet a l'extrémité de son bras.
Pour de plus amples informations:
cliquez ici.
Articles :
Il Corpo del Suono
CORRIERE DELLA SERA
IL GAZZETTINO, La Nuiva, CORRIERE DEL VENETO
il Giornale
La Repubblica
nova
ilvenerdi di Repubblica
la Repubblica
nova
ilvnerdi di Repubblica
Venezia Musica
|